Fictitious force
| Classical mechanics |
|---|
|
Core topics |

A fictitious force, also called a pseudo force,[1] d'Alembert force[2][3] or inertial force,[4][5] is an apparent force that acts on all masses whose motion is described using a non-inertial frame of reference, such as a rotating reference frame.
The force F does not arise from any physical interaction between two objects, but rather from the acceleration a of the non-inertial reference frame itself. As stated by Iro:[6][7]
Such an additional force due to nonuniform relative motion of two reference frames is called a pseudo-force.— H. Iro in A Modern Approach to Classical Mechanics p. 180
Assuming Newton's second law in the form F = ma, fictitious forces are always proportional to the mass m.
A fictitious force on an object arises when the frame of reference used to describe the object's motion is accelerating compared to a non-accelerating frame. As a frame can accelerate in any arbitrary way, so can fictitious forces be as arbitrary (but only in direct response to the acceleration of the frame). However, four fictitious forces are defined for frames accelerated in commonly occurring ways: one caused by any relative acceleration of the origin in a straight line (rectilinear acceleration);[8] two involving rotation: centrifugal force and Coriolis force; and a fourth, called the Euler force, caused by a variable rate of rotation, should that occur. Gravitational force would also be a fictitious force based upon a field model in which particles distort spacetime due to their mass.
Background
The role of fictitious forces in Newtonian mechanics is described by Tonnelat:[9]
For Newton, the appearance of acceleration always indicates the existence of absolute motion – absolute motion of matter where real forces are concerned; absolute motion of the reference system, where so-called fictitious forces, such as inertial forces or those of Coriolis, are concerned.— Marie-Antoinette Tonnelat in The Principles of Electromagnetic Theory and Relativity, p. 113
Fictitious forces on Earth
The surface of the Earth is a rotating reference frame. To solve classical mechanics problems exactly in an Earth-bound reference frame, three fictitious forces must be introduced, the Coriolis force, the centrifugal force (described below) and the Euler force. The Euler force is typically ignored because the variations in the angular velocity of the rotating Earth surface are usually insignificant. Both of the other fictitious forces are weak compared to most typical forces in everyday life, but they can be detected under careful conditions. For example, Léon Foucault was able to show that the Coriolis force results from the Earth's rotation using the Foucault pendulum. If the Earth were to rotate a thousand times faster (making each day only ≈86 seconds long), people could easily get the impression that such fictitious forces are pulling on them, as on a spinning carousel.
Detection of non-inertial reference frame
Observers inside a closed box that is moving with a constant velocity cannot detect their own motion; however, observers within an accelerating reference frame can detect that they are in a non-inertial reference frame from the fictitious forces that arise. For example, for straight-line acceleration Vladimir Arnold presents the following theorem:[10]
In a coordinate system K which moves by translation relative to an inertial system k, the motion of a mechanical system takes place as if the coordinate system were inertial, but on every point of mass m an additional "inertial force" acted: F = −ma, where a is the acceleration of the system K.
Other accelerations also give rise to fictitious forces, as described mathematically below. The physical explanation of motions in an inertial frame is the simplest possible, requiring no fictitious forces: fictitious forces are zero, providing a means to distinguish inertial frames from others.[11]
An example of the detection of a non-inertial, rotating reference frame is the precession of a Foucault pendulum. In the non-inertial frame of the Earth, the fictitious Coriolis force is necessary to explain observations. In an inertial frame outside the Earth, no such fictitious force is necessary.
Examples of fictitious forces
Acceleration in a straight line

Center panel: an exploded view in the inertial frame. The passenger is subject to the accelerating force ma. The seat (assumed of negligible mass) is compressed between the reaction force –ma and the applied force from the car ma. The car is subject to the net acceleration force Ma that is the difference between the applied force (m + M)a from the axle and the reaction from the seat −ma.
Bottom panel: an exploded view in the non-inertial frame. In the non-inertial frame where the car is not accelerating, the force from the axle is balanced by a fictitious backward force −(m + M)a, a portion −Ma applied to the car, and −ma to the passenger. The car is subject to the fictitious force −Ma and the force (m + M)a from the axle. The difference between these forces ma is applied to the seat, which exerts a reaction −ma upon the car, so zero net force is applied to the car. The seat (assumed massless) transmits the force ma to the passenger, who is subject also to the fictitious force −ma, resulting in zero net force on the passenger. The passenger exerts a reaction force −ma upon the seat, which is therefore compressed. In all frames the compression of the seat is the same, and the force delivered by the axle is the same.
Figure 1 (top) shows an accelerating car. When a car accelerates, a passenger feels like they're being pushed back into the seat. In an inertial frame of reference attached to the road, there is no physical force moving the rider backward. However, in the rider's non-inertial reference frame attached to the accelerating car, there is a backward fictitious force. We mention two possible reasons for the force to clarify its (the force's) existence:[12]
- Figure 1 (center panel). To an observer at rest on an inertial reference frame (like the ground), the car will seem to accelerate. In order for the passenger to stay inside the car, a force must be exerted on the passenger. This force is exerted by the seat, which has started to move forward with the car and is compressed against the passenger until it transmits the full force to keep the passenger moving with the car. Thus, the forces exerted by the seat are unbalanced,so the passenger is accelerating in this frame.
- Figure 1 (bottom panel). From the point of view of the interior of the car, an accelerating reference frame, there is a fictitious force pushing the passenger backwards, with magnitude equal to the mass of the passenger times the acceleration of the car. This force pushes the passenger back into the seat, until the seat compresses and provides an equal and opposite force. Thereafter, the passenger is stationary in this frame, because the fictitious force and the real force of the seat are balanced.
How can the accelerating frame be discovered to be non-inertial? In the accelerating frame, everything appears to be subject to zero net force, and nothing moves. Nonetheless, compression of the seat is observed and is explained in the accelerating frame (and in an inertial frame) by the force of acceleration on the seat from the car on one side, and the opposing force of reaction to acceleration by the passenger on the other. Identification of the accelerating frame as non-inertial cannot be based simply on the compression of the seat, which all observers can explain; rather it is based on the simplicity of the physical explanation for this compression.
The explanation of the seat compression in the accelerating frame requires not only the thrust from the axle of the car, but additional (fictitious) forces. In an inertial frame, only the thrust from the axle is necessary. Therefore, the inertial frame has a simpler physical explanation (not necessarily a simpler mathematical formulation, however), indicating the accelerating frame is a non-inertial frame of reference. In other words, in the inertial frame, fictitious forces are zero. See inertial frame for more detail.
This example illustrates how fictitious forces arise from switching from an inertial to a non-inertial reference frame. Calculations of physical quantities (compression of the seat, required force from the axle) made in any frame give the same answers, but in some cases calculations are easier to make in a non-inertial frame. (In this simple example, the calculations are equally complex for the two frames described.)
Animation: driving from block to block  Map and car frame perspectives of physical (red) and fictitious (blue) forces for a car driving from one stop sign to the next.
Map and car frame perspectives of physical (red) and fictitious (blue) forces for a car driving from one stop sign to the next.In this illustration the car accelerates after a stop sign until midway up the block, at which point the driver is immediately off the accelerator and onto the brake so as to make the next stop.
Circular motion
A similar effect occurs in circular motion, circular from the standpoint of an inertial frame of reference attached to the road. When seen from a non-inertial frame of reference attached to the car, the fictitious force called the centrifugal force appears. If the car is moving at constant speed around a circular section of road, the occupants will feel pushed outside by this centrifugal force, away from the center of the turn. Again the situation can be viewed from inertial or non-inertial frames (for free body diagrams, see the turning car):
- From the viewpoint of an inertial reference frame stationary with respect to the road, the car is accelerating toward the center of the circle. This acceleration is necessary because the direction of the velocity is changing, despite a constant speed. This inward acceleration is called centripetal acceleration and requires a centripetal force to maintain the circular motion. This force is exerted by the ground upon the wheels, in this case thanks to the friction between the wheels and the road.[13] The car is accelerating, due to the unbalanced force, which causes it to move in a circle. (See also banked turn.)
- From the viewpoint of a rotating frame, moving with the car, there is a fictitious centrifugal force that tends to push the car toward the outside of the road (and to push the occupants toward the outside of the car). The centrifugal force balances the friction between wheels and road, making the car stationary in this non-inertial frame.
A classic example of fictitious force in circular motion is the experiment of rotating spheres tied by a cord and spinning around their center of mass. In this case, as with the linearly accelerating car example, the identification of a rotating, non-inertial frame of reference can be based upon the vanishing of fictitious forces. In an inertial frame, fictitious forces are not necessary to explain the tension in the string joining the spheres. In a rotating frame, Coriolis and centrifugal forces must be introduced to predict the observed tension.
To consider another example, where a rotating reference frame is very natural to us, namely the surface of the rotating Earth, centrifugal force reduces the apparent force of gravity by about one part in a thousand, depending on latitude. This reduction is zero at the poles, maximum at the equator.
Animation: object released from a carousel  Map and spin frame perspectives of physical (red) and fictitious (blue) forces for an object released from a carousel.
Map and spin frame perspectives of physical (red) and fictitious (blue) forces for an object released from a carousel.From the map frame perspective, what's dangerous on losing centripetal acceleration may be your speed. From the spin frame perspective, the danger instead may lie with the geometric acceleration which gives rise to that fictitious force.Note: With some browsers, you can hit [Esc] to freeze the motion for more detailed analysis. However you may have to reload the page to restart.
The fictitious Coriolis force, which is observed in rotational frames, is ordinarily visible only in very large-scale motion like the projectile motion of long-range guns or the circulation of the Earth's atmosphere (see Rossby number). Neglecting air resistance, an object dropped from a 50-meter-high tower at the equator will fall 7.7 millimeters eastward of the spot below where it is dropped because of the Coriolis force.[14]
In the case of distant objects and a rotating reference frame, what must be taken into account is the resultant force of centrifugal and Coriolis force. Consider a distant star observed from a rotating spacecraft. In the reference frame co-rotating with the spacecraft, the distant star appears to move along a circular trajectory around the spacecraft. The apparent motion of the star is an apparent centripetal acceleration. Just like in the example above of the car in circular motion, the centrifugal force has the same magnitude as the fictitious centripetal force, but is directed in the opposite, centrifugal direction. In this case the Coriolis force is twice the magnitude of the centrifugal force, and it points in centripetal direction. The vector sum of the centrifugal force and the Coriolis force is the total fictitious force, which in this case points in centripetal direction.
Fictitious forces and work
Fictitious forces can be considered to do work, provided that they move an object on a trajectory that changes its energy from potential to kinetic. For example, consider a person in a rotating chair holding a weight in their outstretched hand. If they pull their hand inward toward their body, from the perspective of the rotating reference frame, they have done work against the centrifugal force. When the weight is let go, it spontaneously flies outward relative to the rotating reference frame, because the centrifugal force does work on the object, converting its potential energy into kinetic. From an inertial viewpoint, of course, the object flies away from them because it is suddenly allowed to move in a straight line. This illustrates that the work done, like the total potential and kinetic energy of an object, can be different in a non-inertial frame than an inertial one.
Gravity as a fictitious force
The notion of "fictitious force" comes up in Einstein's general theory of relativity.[15][16] All fictitious forces are proportional to the mass of the object upon which they act, which is also true for gravity.[17] This led Albert Einstein to wonder whether gravity was a fictitious force as well. He noted that a freefalling observer in a closed box would not be able to detect the force of gravity; hence, freefalling reference frames are equivalent to an inertial reference frame (the equivalence principle). Following up on this insight, Einstein was able to formulate a theory with gravity as a fictitious force; attributing the apparent acceleration of gravity to the curvature of spacetime. This idea underlies Einstein's theory of general relativity. See Eötvös experiment.
Animation: ball that rolls off a cliff  Rain and shell frame perspectives of physical (red) and fictitious (blue) forces for an object that rolls off a cliff.
Rain and shell frame perspectives of physical (red) and fictitious (blue) forces for an object that rolls off a cliff.
Mathematical derivation of fictitious forces
General derivation
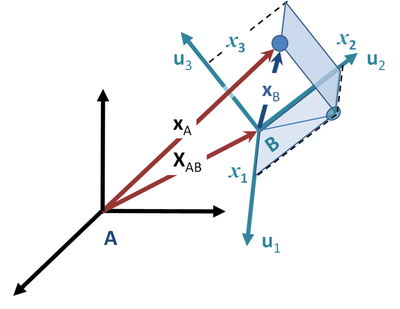
Many problems require use of noninertial reference frames, for example, those involving satellites[19][20] and particle accelerators.[21] Figure 2 shows a particle with mass m and position vector xA(t) in a particular inertial frame A. Consider a non-inertial frame B whose origin relative to the inertial one is given by XAB(t). Let the position of the particle in frame B be xB(t). What is the force on the particle as expressed in the coordinate system of frame B? [22][23]
To answer this question, let the coordinate axis in B be represented by unit vectors uj with j any of { 1, 2, 3 } for the three coordinate axes. Then

The interpretation of this equation is that xB is the vector displacement of the particle as expressed in terms of the coordinates in frame B at time t. From frame A the particle is located at:

As an aside, the unit vectors { uj } cannot change magnitude, so derivatives of these vectors express only rotation of the coordinate system B. On the other hand, vector XAB simply locates the origin of frame B relative to frame A, and so cannot include rotation of frame B.
Taking a time derivative, the velocity of the particle is:

The second term summation is the velocity of the particle, say vB as measured in frame B. That is:

The interpretation of this equation is that the velocity of the particle seen by observers in frame A consists of what observers in frame B call the velocity, namely vB, plus two extra terms related to the rate of change of the frame-B coordinate axes. One of these is simply the velocity of the moving origin vAB. The other is a contribution to velocity due to the fact that different locations in the non-inertial frame have different apparent velocities due to rotation of the frame; a point seen from a rotating frame has a rotational component of velocity that is greater the further the point is from the origin.
To find the acceleration, another time differentiation provides:

Using the same formula already used for the time derivative of xB, the velocity derivative on the right is:

Consequently,
(1)

The interpretation of this equation is as follows: the acceleration of the particle in frame A consists of what observers in frame B call the particle acceleration aB, but in addition there are three acceleration terms related to the movement of the frame-B coordinate axes: one term related to the acceleration of the origin of frame B, namely aAB, and two terms related to rotation of frame B. Consequently, observers in B will see the particle motion as possessing "extra" acceleration, which they will attribute to "forces" acting on the particle, but which observers in A say are "fictitious" forces arising simply because observers in B do not recognize the non-inertial nature of frame B.
The factor of two in the Coriolis force arises from two equal contributions: (i) the apparent change of an inertially constant velocity with time because rotation makes the direction of the velocity seem to change (a dvB/dt term) and (ii) an apparent change in the velocity of an object when its position changes, putting it nearer to or further from the axis of rotation (the change in due to change in x j ).

To put matters in terms of forces, the accelerations are multiplied by the particle mass:

The force observed in frame B, FB = maB is related to the actual force on the particle, FA, by

where:

Thus, we can solve problems in frame B by assuming that Newton's second law holds (with respect to quantities in that frame) and treating Ffictitious as an additional force.[10][24][25]
Below are a number of examples applying this result for fictitious forces. More examples can be found in the article on centrifugal force.
Rotating coordinate systems
A common situation in which noninertial reference frames are useful is when the reference frame is rotating. Because such rotational motion is non-inertial, due to the acceleration present in any rotational motion, a fictitious force can always be invoked by using a rotational frame of reference. Despite this complication, the use of fictitious forces often simplifies the calculations involved.
To derive expressions for the fictitious forces, derivatives are needed for the apparent time rate of change of vectors that take into account time-variation of the coordinate axes. If the rotation of frame 'B' is represented by a vector Ω pointed along the axis of rotation with orientation given by the right-hand rule, and with magnitude given by

then the time derivative of any of the three unit vectors describing frame B is[24][26]

and
![{\frac {d^{2}{\mathbf {u}}_{j}(t)}{dt^{2}}}={\frac {d{\boldsymbol {\Omega }}}{dt}}\times {\mathbf {u}}_{j}+{\boldsymbol {\Omega }}\times {\frac {d{\mathbf {u}}_{j}(t)}{dt}}={\frac {d{\boldsymbol {\Omega }}}{dt}}\times {\mathbf {u}}_{j}+{\boldsymbol {\Omega }}\times \left[{\boldsymbol {\Omega }}\times {\mathbf {u}}_{j}(t)\right],](../I/m/93ac7b3e470c0383095d8dffe9386d7380009443.svg)
as is verified using the properties of the vector cross product. These derivative formulas now are applied to the relationship between acceleration in an inertial frame, and that in a coordinate frame rotating with time-varying angular velocity ω(t). From the previous section, where subscript A refers to the inertial frame and B to the rotating frame, setting aAB = 0 to remove any translational acceleration, and focusing on only rotational properties (see Eq. 1):

![{\mathbf {a}}_{{\mathrm {A}}}={\mathbf {a}}_{{\mathrm {B}}}+\ 2\sum _{{j=1}}^{3}v_{j}{\boldsymbol {\Omega }}\times {\mathbf {u}}_{j}(t)+\sum _{{j=1}}^{3}x_{j}{\frac {d{\boldsymbol {\Omega }}}{dt}}\times {\mathbf {u}}_{j}\ +\sum _{{j=1}}^{3}x_{j}{\boldsymbol {\Omega }}\times \left[{\boldsymbol {\Omega }}\times {\mathbf {u}}_{j}(t)\right]](../I/m/96dc30b84132230ac215855fa4d0319c2dbcf3d8.svg)
![={\mathbf {a}}_{{\mathrm {B}}}+2{\boldsymbol {\Omega }}\times \sum _{{j=1}}^{3}v_{j}{\mathbf {u}}_{j}(t)+{\frac {d{\boldsymbol {\Omega }}}{dt}}\times \sum _{{j=1}}^{3}x_{j}{\mathbf {u}}_{j}+{\boldsymbol {\Omega }}\times \left[{\boldsymbol {\Omega }}\times \sum _{{j=1}}^{3}x_{j}{\mathbf {u}}_{j}(t)\right].](../I/m/293eec0a9c617ab543f1bacc6e093cb161868879.svg)
Collecting terms, the result is the so-called acceleration transformation formula:[27]

The physical acceleration aA due to what observers in the inertial frame A call real external forces on the object is, therefore, not simply the acceleration aB seen by observers in the rotational frame B, but has several additional geometric acceleration terms associated with the rotation of B. As seen in the rotational frame, the acceleration aB of the particle is given by rearrangement of the above equation as:

The net force upon the object according to observers in the rotating frame is FB = maB. If their observations are to result in the correct force on the object when using Newton's laws, they must consider that the additional force Ffict is present, so the end result is FB = FA + Ffict. Thus, the fictitious force used by observers in B to get the correct behavior of the object from Newton's laws equals:

Here, the first term is the Coriolis force,[28] the second term is the centrifugal force,[29] and the third term is the Euler force.[30][31]
Orbiting coordinate systems

As a related example, suppose the moving coordinate system B rotates in a circle of radius R about the fixed origin of inertial frame A, but maintains its coordinate axes fixed in orientation, as in Figure 3. The acceleration of an observed body is now (see Eq. 1):



where the summations are zero inasmuch as the unit vectors have no time dependence. The origin of system B is located according to frame A at:

leading to a velocity of the origin of frame B as:

leading to an acceleration of the origin of B given by:



Because the first term, which is

is of the same form as the normal centrifugal force expression:

it is a natural extension of standard terminology (although there is no standard terminology for this case) to call this term a "centrifugal force". Whatever terminology is adopted, the observers in frame B must introduce a fictitious force, this time due to the acceleration from the orbital motion of their entire coordinate frame, that is radially outward away from the center of rotation of the origin of their coordinate system:

and of magnitude:

Notice that this "centrifugal force" has differences from the case of a rotating frame. In the rotating frame the centrifugal force is related to the distance of the object from the origin of frame B, while in the case of an orbiting frame, the centrifugal force is independent of the distance of the object from the origin of frame B, but instead depends upon the distance of the origin of frame B from its center of rotation, resulting in the same centrifugal fictitious force for all objects observed in frame B.
Orbiting and rotating
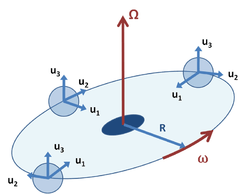
As a combination example, Figure 4 shows a coordinate system B that orbits inertial frame A as in Figure 3, but the coordinate axes in frame B turn so unit vector u1 always points toward the center of rotation. This example might apply to a test tube in a centrifuge, where vector u1 points along the axis of the tube toward its opening at its top. It also resembles the Earth-Moon system, where the Moon always presents the same face to the Earth.[32] In this example, unit vector u3 retains a fixed orientation, while vectors u1, u2 rotate at the same rate as the origin of coordinates. That is,




Hence, the acceleration of a moving object is expressed as (see Eq. 1):






where the angular acceleration term is zero for constant rate of rotation. Because the first term, which is

is of the same form as the normal centrifugal force expression:
it is a natural extension of standard terminology (although there is no standard terminology for this case) to call this term the "centrifugal force". Applying this terminology to the example of a tube in a centrifuge, if the tube is far enough from the center of rotation, |XAB| = R ≫ |xB|, all the matter in the test tube sees the same acceleration (the same centrifugal force). Thus, in this case, the fictitious force is primarily a uniform centrifugal force along the axis of the tube, away from the center of rotation, with a value |FFict| = ω2 R, where R is the distance of the matter in the tube from the center of the centrifuge. It is standard specification of a centrifuge to use the "effective" radius of the centrifuge to estimate its ability to provide centrifugal force. Thus, a first estimate of centrifugal force in a centrifuge can be based upon the distance of the tubes from the center of rotation, and corrections applied if needed.[33][34]
Also, the test tube confines motion to the direction down the length of the tube, so vB is opposite to u1 and the Coriolis force is opposite to u2, that is, against the wall of the tube. If the tube is spun for a long enough time, the velocity vB drops to zero as the matter comes to an equilibrium distribution. For more details, see the articles on sedimentation and the Lamm equation.
A related problem is that of centrifugal forces for the Earth-Moon-Sun system, where three rotations appear: the daily rotation of the Earth about its axis, the lunar-month rotation of the Earth-Moon system about their center of mass, and the annual revolution of the Earth-Moon system about the Sun. These three motions influence the tides.[35]
Crossing a carousel
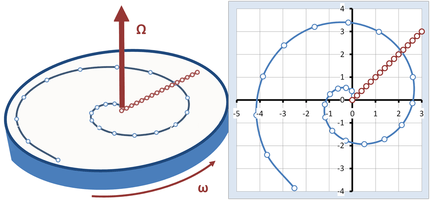
Figure 5 shows another example comparing the observations of an inertial observer with those of an observer on a rotating carousel.[36] The carousel rotates at a constant angular velocity represented by the vector Ω with magnitude ω, pointing upward according to the right-hand rule. A rider on the carousel walks radially across it at constant speed, in what appears to the walker to be the straight line path inclined at 45° in Figure 5 . To the stationary observer, however, the walker travels a spiral path. The points identified on both paths in Figure 5 correspond to the same times spaced at equal time intervals. We ask how two observers, one on the carousel and one in an inertial frame, formulate what they see using Newton's laws.
Inertial observer
The observer at rest describes the path followed by the walker as a spiral. Adopting the coordinate system shown in Figure 5, the trajectory is described by r(t):

where the added π/4 sets the path angle at 45° to start with (just an arbitrary choice of direction), uR is a unit vector in the radial direction pointing from the center of the carousel to the walker at time t. The radial distance R(t) increases steadily with time according to:

with s the speed of walking. According to simple kinematics, the velocity is then the first derivative of the trajectory:


with uθ a unit vector perpendicular to uR at time t (as can be verified by noticing that the vector dot product with the radial vector is zero) and pointing in the direction of travel. The acceleration is the first derivative of the velocity:



The last term in the acceleration is radially inward of magnitude ω2 R, which is therefore the instantaneous centripetal acceleration of circular motion.[37] The first term is perpendicular to the radial direction, and pointing in the direction of travel. Its magnitude is 2sω, and it represents the acceleration of the walker as the edge of the carousel is neared, and the arc of circle traveled in a fixed time increases, as can be seen by the increased spacing between points for equal time steps on the spiral in Figure 5 as the outer edge of the carousel is approached.
Applying Newton's laws, multiplying the acceleration by the mass of the walker, the inertial observer concludes that the walker is subject to two forces: the inward, radially directed centripetal force, and another force perpendicular to the radial direction that is proportional to the speed of the walker.
Rotating observer
The rotating observer sees the walker travel a straight line from the center of the carousel to the periphery, as shown in Figure 5. Moreover, the rotating observer sees that the walker moves at a constant speed in the same direction, so applying Newton's law of inertia, there is zero force upon the walker. These conclusions do not agree with the inertial observer. To obtain agreement, the rotating observer has to introduce fictitious forces that appear to exist in the rotating world, even though there is no apparent reason for them, no apparent gravitational mass, electric charge or what have you, that could account for these fictitious forces.
To agree with the inertial observer, the forces applied to the walker must be exactly those found above. They can be related to the general formulas already derived, namely:
In this example, the velocity seen in the rotating frame is:

with uR a unit vector in the radial direction. The position of the walker as seen on the carousel is:

and the time derivative of Ω is zero for uniform angular rotation. Noticing that

and

we find:

To obtain a straight-line motion in the rotating world, a force exactly opposite in sign to the fictitious force must be applied to reduce the net force on the walker to zero, so Newton's law of inertia will predict a straight line motion, in agreement with what the rotating observer sees. The fictitious forces that must be combated are the Coriolis force (first term) and the centrifugal force (second term). (These terms are approximate.[38]) By applying forces to counter these two fictitious forces, the rotating observer ends up applying exactly the same forces upon the walker that the inertial observer predicted were needed.
Because they differ only by the constant walking velocity, the walker and the rotational observer see the same accelerations. From the walker's perspective, the fictitious force is experienced as real, and combating this force is necessary to stay on a straight line radial path holding constant speed. It's like battling a crosswind while being thrown to the edge of the carousel.
Observation
Notice that this kinematical discussion does not delve into the mechanism by which the required forces are generated. That is the subject of kinetics. In the case of the carousel, the kinetic discussion would involve perhaps a study of the walker's shoes and the friction they need to generate against the floor of the carousel, or perhaps the dynamics of skateboarding, if the walker switched to travel by skateboard. Whatever the means of travel across the carousel, the forces calculated above must be realized. A very rough analogy is heating your house: you must have a certain temperature to be comfortable, but whether you heat by burning gas or by burning coal is another problem. Kinematics sets the thermostat, kinetics fires the furnace.
See also
Notes
- ↑ Richard Phillips Feynman; Leighton R B; Sands M L (2006). The Feynman Lectures on Physics. San Francisco: Pearson/Addison-Wesley. Vol. I, section 12–5. ISBN 0-8053-9049-9.
- ↑ Cornelius Lanczos (1986). The Variational Principles of Mechanics. New York: Courier Dover Publications. p. 100. ISBN 0-486-65067-7.
- ↑ Seligman, Courtney. "Fictitious Forces". Retrieved 2007-09-03.
- ↑ Max Born; Günther Leibfried (1962). Einstein's Theory of Relativity. New York: Courier Dover Publications. pp. 76–78. ISBN 0-486-60769-0.
- ↑ NASA notes:(23) Accelerated Frames of Reference: Inertial Forces
- ↑ Harald Iro (2002). A Modern Approach to Classical Mechanics. World Scientific. p. 180. ISBN 981-238-213-5.
- ↑ In this connection, it may be noted that a change in coordinate system, for example, from Cartesian to polar, if implemented without any change in relative motion, does not cause the appearance of fictitious forces, despite the fact that the form of the laws of motion varies from one type of curvilinear coordinate system to another.
- ↑ The term d'Alembert force often is limited to this case. See Lanczos, for example.
- ↑ Marie-Antoinette Tonnelat (2002). The Principles of Electromagnetic Theory and Relativity. Springer. p. 113. ISBN 90-277-0107-5.
- 1 2 Vladimir Igorevich Arnold (1989). Mathematical Methods of Classical Mechanics. Berlin: Springer. pp. §27 pp. 129 ff. ISBN 0-387-96890-3.
- ↑ As part of the requirement of simplicity, to be an inertial frame, in all other frames that differ only by a uniform rate of translation, the description should be of the same form. However, in the Newtonian system the Galilean transformation connects these frames and in the special theory of relativity the Lorentz transformation connects them. The two transformations agree for speeds of translation much less than the speed of light.
- ↑ Lloyd Motz; Jefferson Hane Weaver (2002). The Concepts of Science: From Newton to Einstein. Basic Books. p. 101. ISBN 0-7382-0834-5.
- ↑ The force in this example is known as ground reaction, and it could exist even without friction, for example, a sled running down a curve of a bobsled track.
- ↑ Daniel Kleppner; Robert J. Kolenkow (1973). An Introduction to Mechanics. McGraw-Hill. p. 363. ISBN 0-07-035048-5.
- ↑ Fritz Rohrlich (2007). Classical charged particles. Singapore: World Scientific. p. 40. ISBN 981-270-004-8.
- ↑ Hans Stephani (2004). Relativity: An Introduction to Special and General Relativity. Cambridge UK: Cambridge University Press. p. 105. ISBN 0-521-01069-1.
- ↑ The gravitational mass and the inertial mass are found experimentally to be equal to within experimental error.
- ↑ Edwin F. Taylor and John Archibald Wheeler (2000) Exploring black holes (Addison Wesley Longman, NY) ISBN 0-201-38423-X
- ↑ Alberto Isidori; Lorenzo Marconi; Andrea Serrani (2003). Robust Autonomous Guidance: An Internal Model Approach. Springer. p. 61. ISBN 1-85233-695-1.
- ↑ Shuh-Jing Ying (1997). Advanced Dynamics. Reston VA: American Institute of Aeronautics, and Astronautics. p. 172. ISBN 1-56347-224-4.
- ↑ Philip J. Bryant; Kjell Johnsen (1993). The Principles of Circular Accelerators and Storage Rings. Cambridge UK: Cambridge University Press. p. xvii. ISBN 0-521-35578-8.
- ↑ Alexander L Fetter; John D Walecka (2003). Theoretical Mechanics of Particles and Continua. Courier Dover Publications. pp. 33–39. ISBN 0-486-43261-0.
- ↑ Yung-kuo Lim; Yuan-qi Qiang (2001). Problems and Solutions on Mechanics: Major American Universities Ph.D. Qualifying Questions and Solutions. Singapore: World Scientific. p. 183. ISBN 981-02-1298-4.
- 1 2 John Robert Taylor (2004). Classical Mechanics. Sausalito CA: University Science Books. pp. 343–344. ISBN 1-891389-22-X.
- ↑ Kleppner, pages 62–63
- ↑ See for example, JL Synge; BA Griffith (1949). Principles of Mechanics (2nd ed.). McGraw-Hill. pp. 348–349.
- ↑ R. Douglas Gregory (2006). Classical Mechanics: An Undergraduate Text. Cambridge UK: Cambridge University Press. pp. Eq. (17.16), p. 475. ISBN 0-521-82678-0.
- ↑ Georg Joos; Ira M. Freeman (1986). Theoretical Physics. New York: Courier Dover Publications. p. 233. ISBN 0-486-65227-0.
- ↑ Percey F. Smith & William Raymond Longley (1910). Theoretical Mechanics. Boston: Gin. p. 118.
- ↑ Cornelius Lanczos (1986). The Variational Principles of Mechanics. New York: Courier Dover Publications. p. 103. ISBN 0-486-65067-7.
- ↑ Jerold E. Marsden; Tudor.S. Ratiu (1999). Introduction to Mechanics and Symmetry: A Basic Exposition of Classical Mechanical Systems: Texts in applied mathematics, 17 (2nd ed.). NY: Springer-Verlag. p. 251. ISBN 0-387-98643-X.
- ↑ However, the Earth-Moon system rotates about its barycenter, not the Earth's center; see Simon Newcomb (2007). Popular Astronomy. Read Books. p. 307. ISBN 1-4067-4574-X.
- ↑ Bea K Lalmahomed; Sarah Springman; Bhawani Singh (2002). Constitutive and Centrifuge Modelling: Two Extremes. Taylor and Francis. p. 82. ISBN 90-5809-361-1.
- ↑ Raymond Nen (1986). Consolidation of Soils: Testing and Evaluation: a Symposium. ASTM International. p. 590. ISBN 0-8031-0446-4.
- ↑ D Appleton (1877). The Popular Science Monthly. p. 276.
- ↑ For a similar example, see Ron Schmitt (2002). A Handbook for Wireless/ RF, EMC, and High-Speed Electronics, Part of the EDN Series for Design Engineers. Newnes. pp. 60–61. ISBN 0-7506-7403-2., and Douglas C. Giancoli (2007). Physics for Scientists And Engineers With Modern Physics. Pearson Prentice-Hall. p. 301. ISBN 0-13-149508-9.
- ↑ Note: There is a subtlety here: the distance R is the instantaneous distance from the rotational axis of the carousel. However, it is not the radius of curvature of the walker's trajectory as seen by the inertial observer, and the unit vector uR is not perpendicular to the path. Thus, the designation "centripetal acceleration" is an approximate use of this term. See, for example, Howard D. Curtis (2005). Orbital Mechanics for Engineering Students. Butterworth-Heinemann. p. 5. ISBN 0-7506-6169-0. and S. Y. Lee (2004). Accelerator physics (2nd ed.). Hackensack NJ: World Scientific. p. 37. ISBN 981-256-182-X.
- ↑ A circle about the axis of rotation is not the osculating circle of the walker's trajectory, so "centrifugal" and "Coriolis" are approximate uses for these terms. See note.
Further reading
- Lev D. Landau and E. M. Lifshitz (1976). Mechanics. Course of Theoretical Physics. Vol. 1 (3rd ed.). Butterworth-Heinenan. pp. 128–130. ISBN 0-7506-2896-0.
- Keith Symon (1971). Mechanics (3rd ed.). Addison-Wesley. ISBN 0-201-07392-7.
- Jerry B. Marion (1970). Classical Dynamics of Particles and Systems. Academic Press. ISBN 0-12-472252-0.
- Marcel J. Sidi (1997). Spacecraft Dynamics and Control: A Practical Engineering Approach. Cambridge University Press. Chapter 4.8. ISBN 0-521-78780-7.
External links
- Q and A from Richard C. Brill, Honolulu Community College
- NASA's David Stern: Lesson Plans for Teachers #23 on Inertial Forces
- Coriolis Force
- Motion over a flat surface Java physlet by Brian Fiedler illustrating fictitious forces. The physlet shows both the perspective as seen from a rotating and from a non-rotating point of view.
- Motion over a parabolic surface Java physlet by Brian Fiedler illustrating fictitious forces. The physlet shows both the perspective as seen from a rotating and as seen from a non-rotating point of view.